创新点:
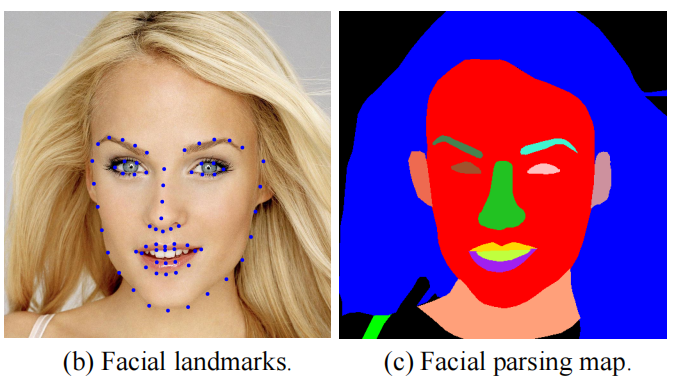
①利用几何先验,即面部地标热图和解析图
②引入对抗性网络(FSRGAN)
总体流程:先经过一个网络来恢复粗糙图像,然后进入两个分支分别是精细的SR编码器和先验信息评估网络。先验信息评估网络提取图像特征然后对landmark和heatmaps进行评估。
网络结构
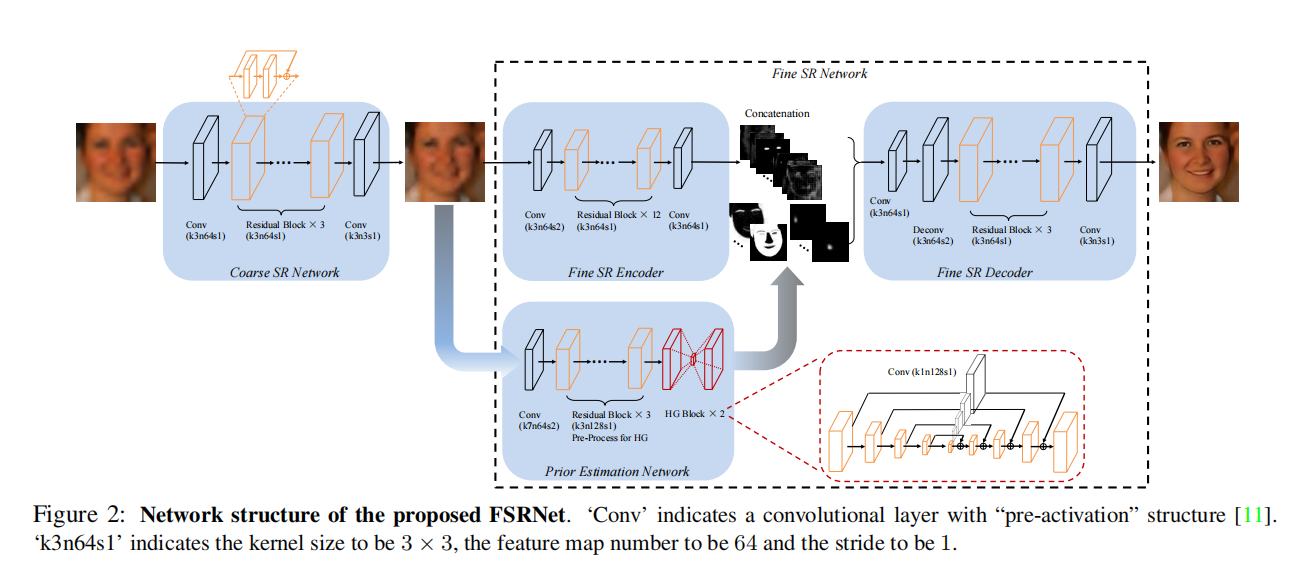
核心结构(四个网络):
CoarseSRNetwork()
FineSREncoder()
PriorEstimationNetwork()
FineSRDecoder()
代码
-
CoarseSRNetwork
class CoarseSRNetwork(nn.Module): def __init__(self): super(CoarseSRNetwork, self).__init__() self.conv1 = nn.Sequential( nn.ReflectionPad2d(1), nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=0, bias=False), nn.BatchNorm2d(64), nn.ReLU(True), ) self.res_blocks = nn.Sequential(*([ResBlock(64)] * 3)) self.conv2 = nn.Sequential( nn.ReflectionPad2d(1), nn.Conv2d(64, 3, kernel_size=3, stride=1, padding=0, bias=False), nn.Tanh(), ) def forward(self, x): out = self.conv1(x) out = self.res_blocks(out) out = self.conv2(out) return out -
FineSREncoder
class FineSREncoder(nn.Module): def __init__(self): super(FineSREncoder, self).__init__() self.conv1 = nn.Sequential( nn.Conv2d(3, 64, kernel_size=3, stride=2, padding=1, bias=False), nn.BatchNorm2d(64), nn.ReLU(True), ) self.res_blocks = nn.Sequential(*([ResBlock(64)] * 12)) self.conv2 = nn.Sequential( nn.ReflectionPad2d(1), nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=0, bias=False), nn.Tanh(), ) def forward(self, x): out = self.conv1(x) out = self.res_blocks(out) out = self.conv2(out) return out -
PriorEstimationNetwork
class PriorEstimationNetwork(nn.Module): def __init__(self): super(PriorEstimationNetwork, self).__init__() self.conv1 = nn.Sequential( nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False), nn.BatchNorm2d(64), nn.ReLU(True), ) self.res_blocks = nn.Sequential( Residual(64, 128), ResBlock(128), ResBlock(128), ) self.hg_blocks = nn.Sequential( HourGlassBlock(128, 3), # 漏斗状的残差卷积网络 HourGlassBlock(128, 3), ) def forward(self, x): out = self.conv1(x) out = self.res_blocks(out) out = self.hg_blocks(out) return out -
FineSRDecoder
class FineSRDecoder(nn.Module): def __init__(self): super(FineSRDecoder, self).__init__() self.conv1 = nn.Sequential( nn.Conv2d(192, 64, kernel_size=3, stride=1, padding=1, bias=False), nn.BatchNorm2d(64), nn.ReLU(True), ) self.deconv1 = nn.Sequential( nn.ConvTranspose2d(64, 64, kernel_size=3, stride=2, padding=1, output_padding=1, bias=False), nn.BatchNorm2d(64), nn.ReLU(True), ) self.res_blocks = nn.Sequential(*([ResBlock(64)] * 3)) self.conv2 = nn.Sequential( nn.ReflectionPad2d(1), nn.Conv2d(64, 3, kernel_size=3, stride=1, padding=0, bias=False), nn.Tanh(), ) def forward(self, x): out = self.conv1(x) out = self.deconv1(out) out = self.res_blocks(out) out = self.conv2(out) return out -
主体结构
class FSRNet(nn.Module): def __init__(self, hmaps_ch, pmaps_ch): ... def forward(self, x): y_c = self.csr_net(x) # 粗糙网络 f = self.fsr_enc(y_c) # 精细的SR编码器 p = self.pre_net(y_c) # 先验网络 # 1x1 conv for hmaps & pmaps(构造先验评估的结果) b1 = (self.prior_conv1 is not None) b2 = (self.prior_conv2 is not None) if b1 and b2: hmaps = self.prior_conv1(p) pmaps = self.prior_conv2(p) prs = torch.cat((hmaps, pmaps), 1) elif b1: prs = self.prior_conv1(p) elif b2: prs = self.prior_conv2(p) concat = torch.cat((f, p), 1) # 合并sr编码器 out = self.fsr_dec(concat) # sr解码器 return y_c, prs, out -
损失计算
loss1 = criterion(y_c, image_hr) loss2 = criterion(out, image_hr) loss3 = criterion(prs, image_pr) loss = loss1 + loss2 + loss3
疑问
为何卷积构成的PriorEstimationNetwork能提取先验信息?
答:因为这个网络的损失是单独计算的,与groundtruth的hmaps和pmaps来比较。